Kevin C. Zhou1,2,4, Mark Harfouche2, Maxwell Zheng2, Joakim Jönsson1, Kyung Chul Lee1,3, Ron Appel2, Paul Reamey2, Thomas Doman2, Veton Saliu2, Gregor Horstmeyer2, Seung Ah Lee3, Roarke Horstmeyer1,2
1Department of Biomedical Engineering, Duke University, Durham NC, USA.
2Ramona Optics Inc., 1000 W Main St., Durham, NC 27701, USA.
3School of Electrical and Electronic Engineering, Yonsei University, Seoul, 03722, South Korea.
4Current affiliation: Department of Electrical Engineering and Computer Sciences, University of California, Berkeley, CA 94720, USA.
Abstract
We present a large-scale computational 3D topographic microscope that enables 6-gigapixel profilometric 3D imaging at micron-scale resolution across >110 cm2 areas over multi-millimeter axial ranges. Our computational microscope, termed STARCAM (Scanning Topographic All-in-focus Reconstruction with a Computational Array Microscope), features a parallelized, 54-camera architecture with 3-axis translation to capture, for each sample of interest, a multi-dimensional, 2.1-terabyte (TB) dataset, consisting of a total of 224,640 9.4-megapixel images. We developed a self-supervised neural network-based algorithm for 3D reconstruction and stitching that jointly estimates an all-in-focus photometric composite and 3D height map across the entire field of view, using multi-view stereo information and image sharpness as a focal metric. The memory-efficient, compressed differentiable representation offered by the neural network effectively enables joint participation of the entire multi-TB dataset during the reconstruction process. To demonstrate the broad utility of our new computational microscope, we applied STARCAM to a variety of decimeter-scale objects, with applications ranging from cultural heritage to industrial inspection.
Overview
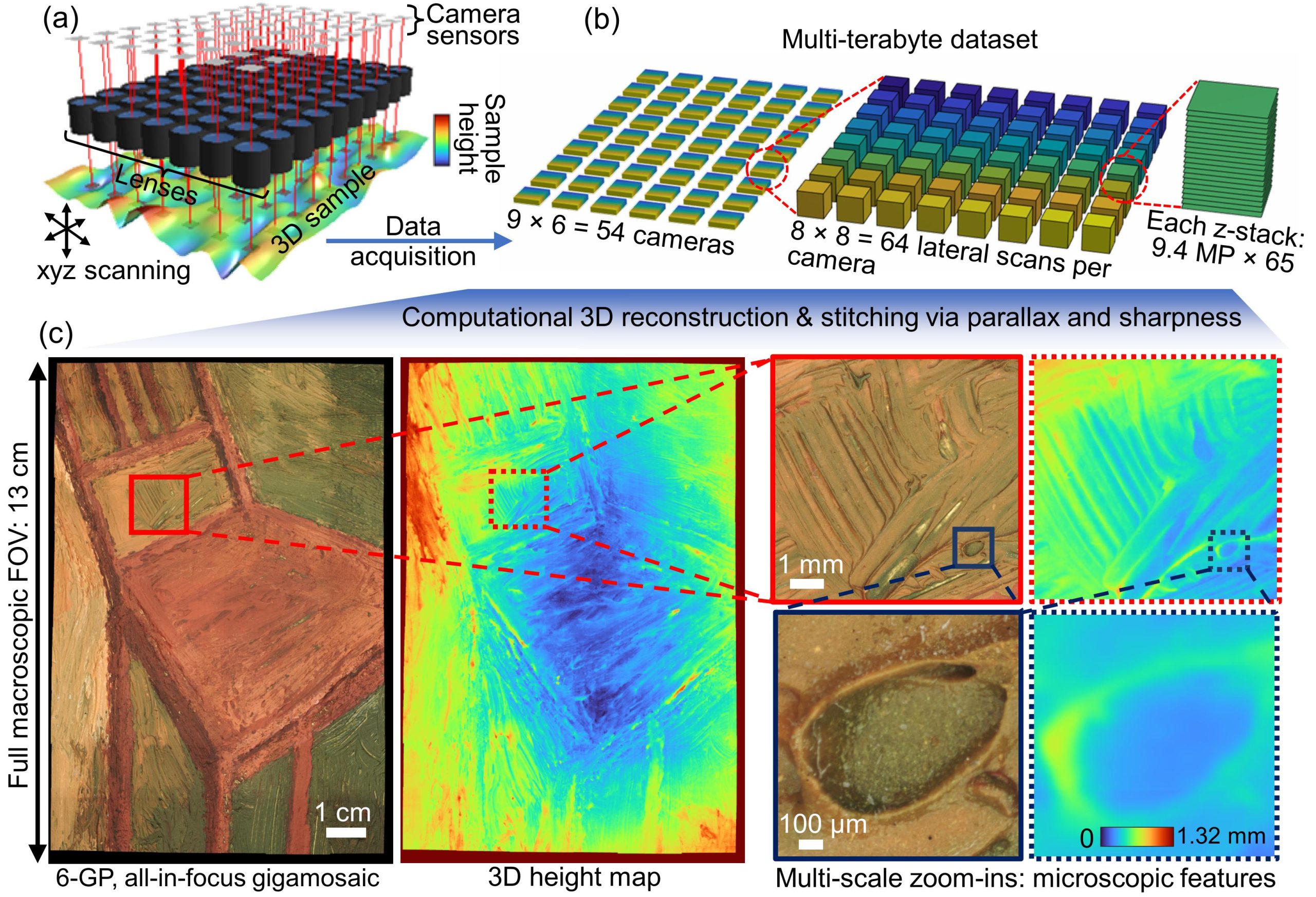
Fig 1: Overview of STARCAM. (a, b) Data acquisition involves scanning a 3D object in three dimensions and synchronously capturing ~9.4-MP, high-resolution images across an array of 9×6 cameras. Lateral scanning (8×8) is necessary to fill in the gaps between sensors, due to the high magnification, as well as provide stereo information for 3D estimation. z-stacking (65 steps) enables 3D topographic estimation of thicker samples using sharpness measures. (c) Our computational 3D reconstruction algorithm generates a 6-GP, all-in-focus gigamosaic along with a coregistered 3D height map